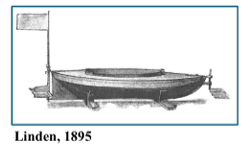
The first published attempt was in 1895 by Herman Linden who filed a British patent for a wave powered boat (Burnett 1979). Linden’s 13 ft long boat named Autonaut, moved against the waves with a speed of three to four miles per hour, powered purely by wave-energy. The boat was equipped with two underwater steel plates, one at the bow and one at the stern.
The idea had been conceptualised much earlier by Vrooman (1858), who suggested that a series of flapping fins could harness the wave energy for propulsion.

Initial developments including models and full scale trials were only reported as interesting ideas rather than academic studies (PopularScience 1935, PopularScience 1950).

Other than a full scale prototype built by Gause (Mechanix1972), wave propelled boats did not receive significant attention until the 1970s when Einar Jakobsen started a series of model experiments and full scale trials.
Jakobsen (1981) performed experiments in Norwegian Hydrodynamics Laboratories (today MARINTEK) in Trondheim, Norway with a model boat of length 1.02 m, at a speed of 1.15 m/s in harmonic head sea waves of waveheight 0.13 m and wave period 1.2 s. Froude scaled to full scale, this is equivalent to a 40 m long ship propelling itself forward solely by
wave power in head sea waves of height 5.2 m at a speed of 14 kn. The speed in following waves was about 15% lower. The model had spring-regulated wings, one above the bow, and another beneath the stern.
Jakobsen and his Wave Control Company used combinations of two and four foils. A maximum speed of six knots was recorded on one occasion.
Terao (1982) in Japan conducted a simplified free running experimental study with a surface boat and submerged flapping foils in waves, which under certain conditions achieved self-propulsion.

Jakobsen latter, by gaining a funding from Norwegian Government, equipped the fishing research vessel Kystfangst, owned by the Institute of Fishery Technology Research, with two horizontal foils on either side of the bulbous bow. Fuel savings of about 15-20% were obtained in a wave height of 3 m by using the foils at speeds of 4-8 knots (Berg 1985). However, the project was terminated due to structural problems.
Grue et al. (1988) developed a theory for a two-dimensional flat plate near the free surface using a frequency-domain integral equation approach, where unsteady foil motions and wave devouring capabilities were illustrated.
Predictions from the above theoretical model were found to be in good agreement with the experimental measurements by Isshiki and Murakami (1984) for both head and following waves. However, at lower wave numbers there were systematic discrepancies between theory and experimental results attributed to nonlinear and free surface effects which were not fully modeled.
Terao and Isshiki (1991) performed full scale tests on with a 15.7 m long fishing vessel. The projected hydrofoil area was 7.4% of the ship’s waterline area. The bow foil reduced the pitching motion, bow slamming and increased the speed in waves.

A full scale trail of a 174 ton Russian research fishing vessel fitted with a pair of submerged foils/wings at the bow showed that such a device could increase the engine power up to 45–87% and reduce ship’s motions by a factor of 2–2.5 (Nikolaev et al. 1995).
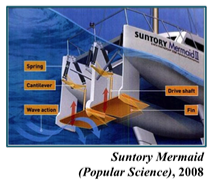
Isshiki’s research lead to a wave driven flapping foil wave propelled Catamaran the Suntory Mermaid II. This vessel crossed the Pacific Ocean in 110 days in 2008 - which remains the longest voyage undertaken by a manned wave propelled boat (Popular Science 2008).
Liquid Robotics have developed a commercial wave propelled ASV platform (the waveglider) with a set of tethered submerged foils driven by the wave-induced heave motion of the floating platform (Hine 2009).
De Silva and Yamaguchi (2012) examined in detail the possibility of extracting energy from gravity waves for marine propulsion, by numerically studying a two-dimensional oscillating hydrofoil using the commercial CFD software. The overall results suggest that actively oscillating-foil systems in waves, under suitable conditions, have the possibility to recover the wave energy rendering these systems applicable to marine unsteady thrusters.
Full scale trials of a `wave devouring propulsion system' (WDPS), a wave propelled ASV catamaran design were performed by Terao (2013, 2015).
The laboratory of Ship and Marine Hydrodynamics of the School of Naval Architecture and Marine Engineering of
National Technical University of Athens starts the BIO-PROPSHIP project. A project investigating the hydrodynamic analysis of flapping wings located beneath the ship’s hull, operating in random motion.

Bøckmann and Steen performed experiments with a model equipped with a foil below the hull for motion reduction and thrust production in waves.
Source: Bøckmann, E. and Steen, S., 2013, May. The effect of a fixed foil on ship propulsion and motions. In Proceedings of the Third International Symposium on Marine Propulsors smp (Vol. 13, pp. 553-561)

Filippas and Belibassakis (2014) have developed a two dimensional time domain boundary element method, to study the performance of a hydrofoil that performs unsteady motions in the proximity of the free surface and in harmonic waves.

Belibassakis and Filippas developed time-domain methods, coupling the ship hull dynamics with foil hydrodynamics in irregular waves, for estimating the ship-foil performance in realistic sea conditions including the effects of foils finite submergence. http://arion.naval.ntua.gr/~biopropship/index_en.html
Huang et al. (2016) proposed an Eco-Ship empowered with active flapping foils exploiting wave propulsion and studied that system experimentally conduction free-running model tests, reporting speed improvement up to 6.24% and significant energy extraction. In 2016 Techno-Ocean (pp. 566-570), IEEE.

Bowker, J.A., Townsend, N.C., Tan, M., Shenoi, R.A., (2016) proposed and investigated (numerically and experimentally) the use of submerged flapping foils of a wave propelled autonomous surface vehicles for energy harvesting.
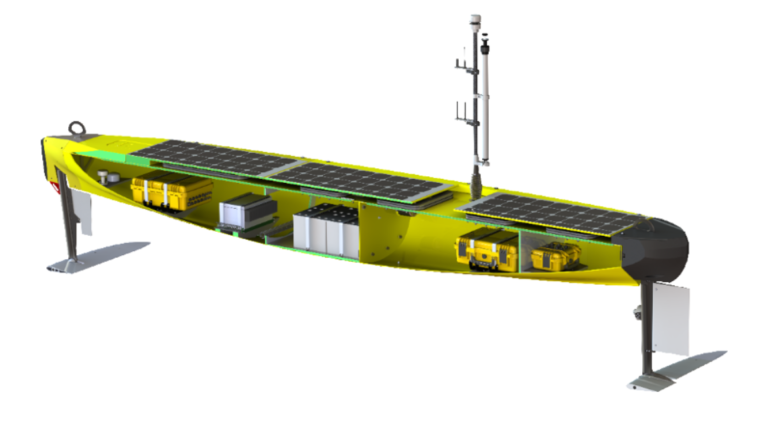
AutoNaut Ltd (Johnston 2017) have developed a commercial wave propelled ASV with submerged foils driven by the wave-induced pitch and heave motion of the surface vehicle (similar to Linden). https://www.autonautusv.com/

Bøckmann, E., Yrke, A. and Steen, S., 2018, estimated the fuel savings for a general cargo ship employing retractable bow foils, showing significant fuel savings when the ship advances at full speed and decreasing when installed power increases. Applied Ocean Research, 76, pp.1-10.

Bowker (2018) developed numerical models to predict the surge, heave, pitch and energy recovery of wave propelled surface vehicles, validating the results against a series of free-running experiments in regular head waves, over a range of wave frequencies for different foil locations.
A full scale trail of a 45m ferry using submerged bow foils was demonstrated by Wavefoil AS. https://wavefoil.com/
Filippas et al (2020) have developed BEM tools in conjunction with CFD tools for investigating and quantifying free-surface effects on the performance of flapping-foil thruster for augmenting ship propulsion in waves.

Bowker et al (2020) have developed a time domain numerical model to predict the forward speed of a free running wave-propelled boat, validating the results against a series of free-running experiments in regular head waves, over a range of wave frequencies for different foil locations.

The EU funded SeaTech Consortium start development and testing of a bio-mimetic dynamic wing to augment ship propulsion in moderate and higher sea states.